wow.. thanks.
anyway in pr5 the way to teach the robot is
To teach the robot for line detection, you may follow these steps:
1. Adjust the robot so that the center infrared sensor is on top of white floor, make sure the wheels and castor of the robot touches the floor properly.
2. Use the screw driver to adjust the preset of center sensor until indicator LED (center) light ON.
3. Now adjust the robot to move the center sensor towards the black line where the reflection of infrared is poor.
4. At this point, make sure the indicator LED is OFF. If the LED is still on, it means you have over tune the preset. Tune it back so that the indicator is OFF.
5. Repeat step a. - d. for a few time and make sure the indicator LED ON and OFF correctly at the right spot.
6. Repeat step a.- e. to "teach" left sensor and right sensor.
7. Now your robot have been "taught".
in step 3, means move the sensor where ar? i mean move it forward is it or what?
in pr23 there are 4 sensors so i guess have to teach it 4 times.. but the sensors are kinda close together so the black line have to be pretty damn thin la.. lol
PR23 question
27 posts
• Page 2 of 3 • 1, 2, 3
Re: PR23 question
![]() by triptych2008 » Sat Jul 25, 2009 8:52 pm
by triptych2008 » Sat Jul 25, 2009 8:52 pm
- triptych2008

- Posts: 5
- Joined: Wed Jul 01, 2009 1:44 pm
Re: PR23 question
![]() by sich » Tue Jul 28, 2009 11:54 am
by sich » Tue Jul 28, 2009 11:54 am
For step 3, i think what it means is that since initially you tune the preset on white floor/surface, so now move the IR sensor to the black surface (on top of the black line) to get the exact threshold value for the op-amp to differentiate between white and black. Then repeat the steps for other sensors.
The sensors for pr23 are close together because that offers smoother line-following. Of cause it highly depends on your line-following program too.
The sensors for pr23 are close together because that offers smoother line-following. Of cause it highly depends on your line-following program too.
-

sich 
- Posts: 603
- Joined: Tue Apr 21, 2009 2:15 pm
Re: PR23 question
![]() by M3RcY » Mon Aug 31, 2009 10:39 pm
by M3RcY » Mon Aug 31, 2009 10:39 pm
For analog IR distance sensor
if (distance< 200)
{
backward();
SPEEDL = 255;
SPEEDR = 255;
buzzer = 0;
why the distance is 200, 250 , 300? The result shown in LCD is 300 when the buzzer on. and the distance increase but the result shown is decreasing. How come the output is like this?
if (distance< 200)
{
backward();
SPEEDL = 255;
SPEEDR = 255;
buzzer = 0;
why the distance is 200, 250 , 300? The result shown in LCD is 300 when the buzzer on. and the distance increase but the result shown is decreasing. How come the output is like this?
- M3RcY
- Posts: 6
- Joined: Mon Aug 31, 2009 10:31 pm
Re: PR23 question
![]() by ober » Tue Sep 01, 2009 12:25 pm
by ober » Tue Sep 01, 2009 12:25 pm
M3RcY, please check the data sheet of infrared sensor, the closer the distance get, the higher the voltage output from that sensor, that is why when ADC value is high (voltage high) mean the robot is close with obstacle. Thus activating the buzzer.
-

ober - Posts: 1486
- Joined: Wed Apr 15, 2009 1:03 pm
Re: PR23 question
![]() by M3RcY » Tue Sep 01, 2009 5:02 pm
by M3RcY » Tue Sep 01, 2009 5:02 pm
how about the infrared sensor, wat is th function of white color and black color?
- M3RcY
- Posts: 6
- Joined: Mon Aug 31, 2009 10:31 pm
Re: PR23 question
![]() by M3RcY » Tue Sep 01, 2009 8:53 pm
by M3RcY » Tue Sep 01, 2009 8:53 pm
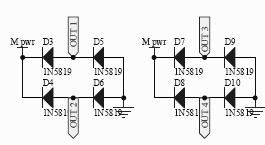
another question, my motor cannot run when the sensor detect the line, what is the problem? i change new L298N and the diode 1N5819 already but it still not running. all connections have been checked carefully.
- M3RcY
- Posts: 6
- Joined: Mon Aug 31, 2009 10:31 pm
Re: PR23 question
![]() by robosang » Tue Sep 01, 2009 10:26 pm
by robosang » Tue Sep 01, 2009 10:26 pm
M3RcY WROTE:how about the infrared sensor, wat is th function of white color and black color?
I don have PR23, but I did bought a PR5 from Cytron long time ago. I really doubted you go through their details description. Those black and transparent is infrared sensor for line following, it will become digital input to determine where is the line relative to robot center. What ober mentioned in previous reply is infrared distance sensor which is being connected to ADC port. the output is analog.
- robosang

- Posts: 1239
- Joined: Wed Jun 10, 2009 5:37 pm
Re: PR23 question
![]() by ober » Wed Sep 02, 2009 10:37 am
by ober » Wed Sep 02, 2009 10:37 am
M3RcY, yes, the infrared that I mentioned is the infrared distance sensor, not the infrared for line following. Sorry about that.
Motor cannot run when the sensor on the line? Will it be connection problem from sensor to the main board? Did you connect the power for motor? Check the polarity. Have you load the program into the mobile robot?
Motor cannot run when the sensor on the line? Will it be connection problem from sensor to the main board? Did you connect the power for motor? Check the polarity. Have you load the program into the mobile robot?
-
ober - Posts: 1486
- Joined: Wed Apr 15, 2009 1:03 pm
Re: PR23 question
![]() by M3RcY » Wed Sep 02, 2009 12:03 pm
by M3RcY » Wed Sep 02, 2009 12:03 pm
ober WROTE:M3RcY, yes, the infrared that I mentioned is the infrared distance sensor, not the infrared for line following. Sorry about that.
Motor cannot run when the sensor on the line? Will it be connection problem from sensor to the main board? Did you connect the power for motor? Check the polarity. Have you load the program into the mobile robot?
The LCD shows the right, left, middle,m_left these commands so i think the sensor is connected. Power for motor also connected, polarity checked, source code for PR 23 also programmed without any changes. i thought is the motor driver L298N problem and i change new L298N and the diode 1N5819 also. but the motor still not work.
- M3RcY
- Posts: 6
- Joined: Mon Aug 31, 2009 10:31 pm
Re: PR23 question
![]() by M3RcY » Wed Sep 02, 2009 7:10 pm
by M3RcY » Wed Sep 02, 2009 7:10 pm
- M3RcY
- Posts: 6
- Joined: Mon Aug 31, 2009 10:31 pm
27 posts
• Page 2 of 3 • 1, 2, 3
Who is online
Users browsing this forum: No registered users and 9 guests