Author/Designer: holy_rainman
Project Description:
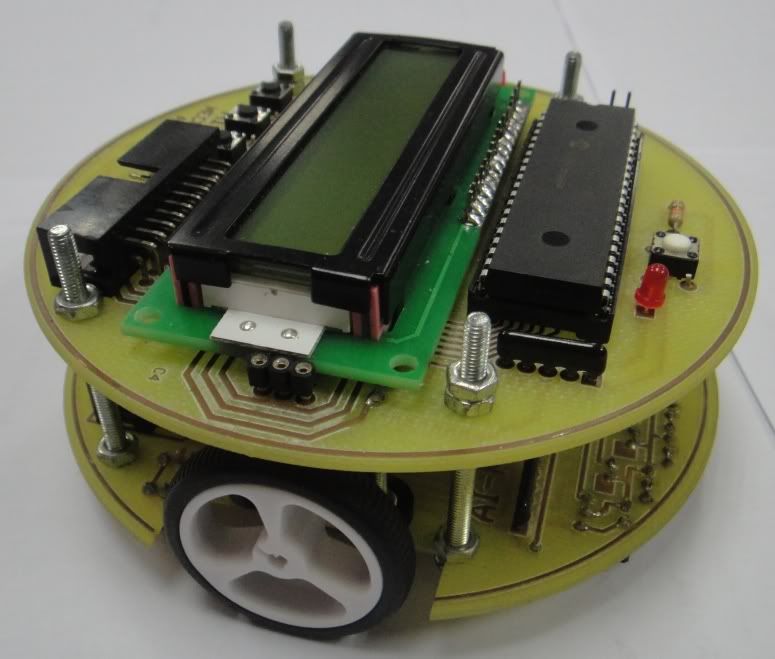
To implement classic PID control algorithm to the Line Following Robot using Basic Language. The sensors used are from CYTRON SN-IRS-02 (thanks for the cute sensor) and are processed using analogue method. The motor driver used are L293D + micrometal gearmotor 30:1 which are common in mobile robot . I made the PCB board stacked together cause it gives a compact image towards the robot. I put on a common LCD to scroll the menu and to ease the troubleshooting process. The hardware cost around RM 250.
Photo/Picture/Figure/Diagram/Flowchart:
The LFR:
PCB Top 1:
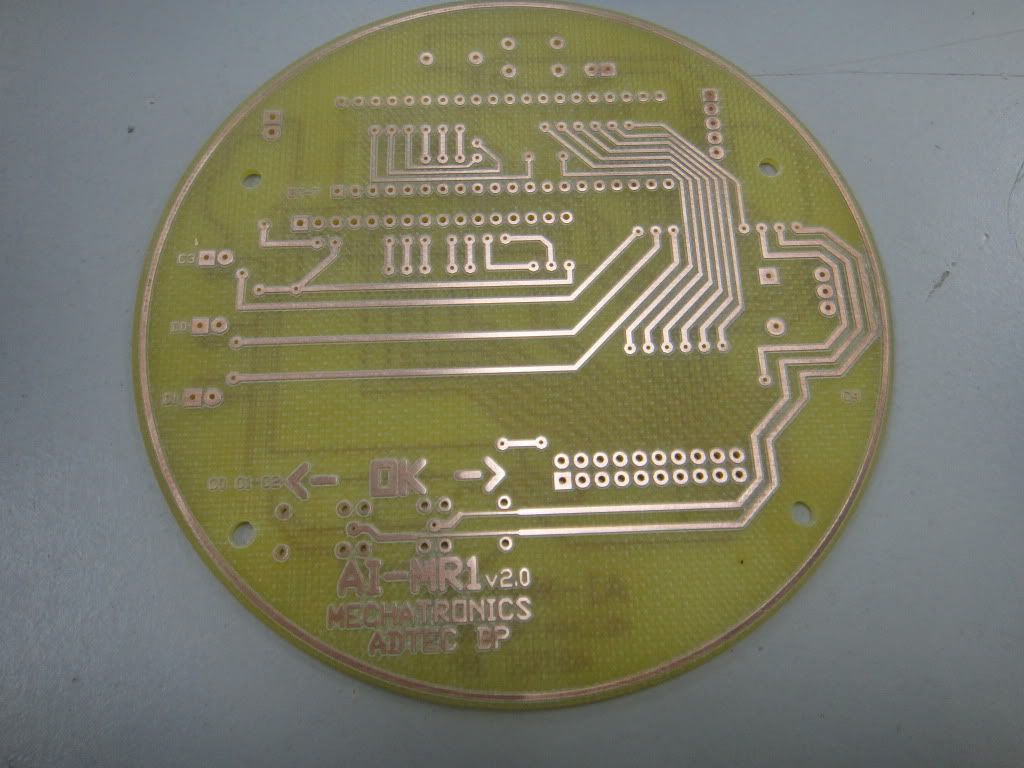
PCB Top 2:
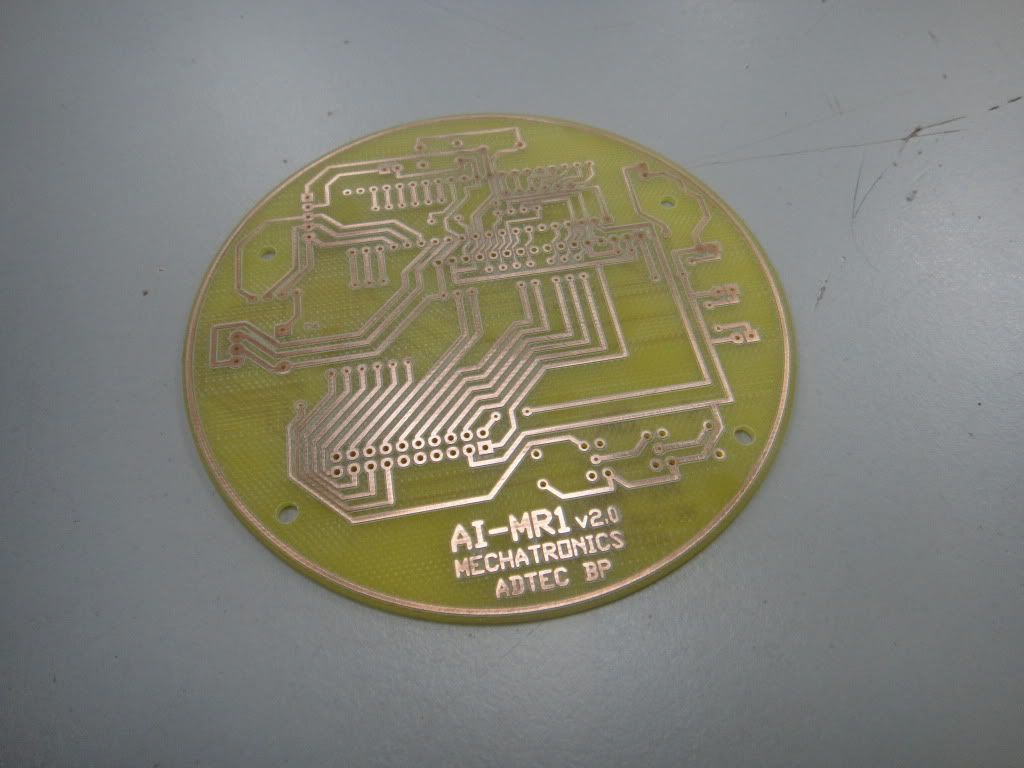
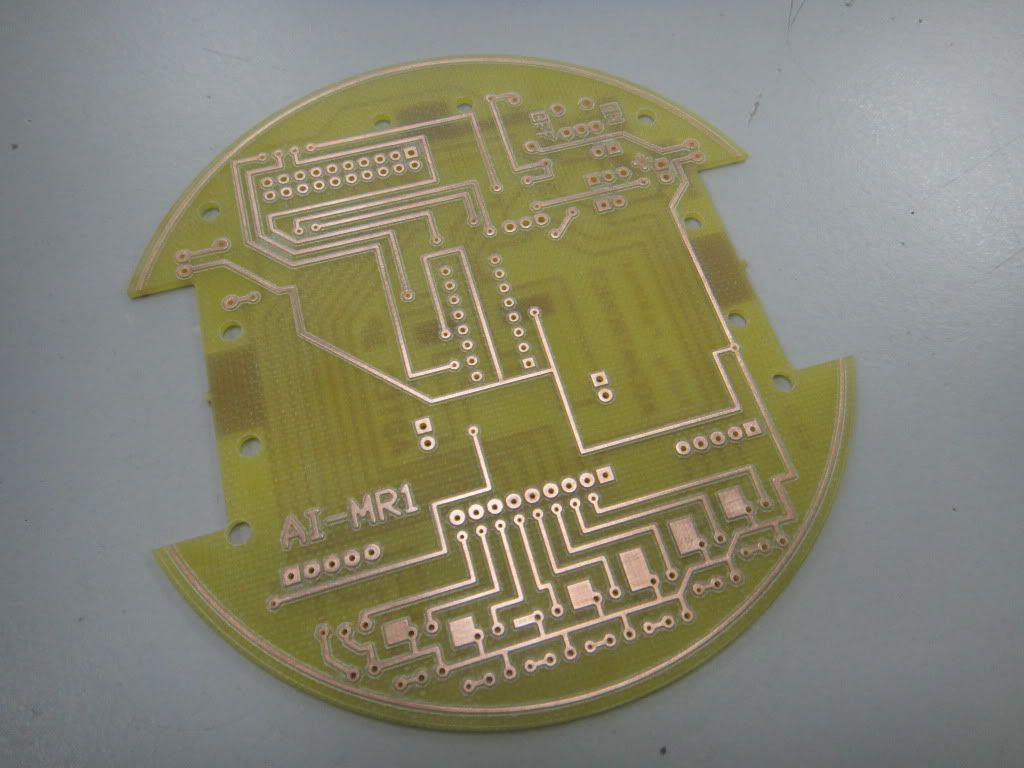
PCB Bottom 1:
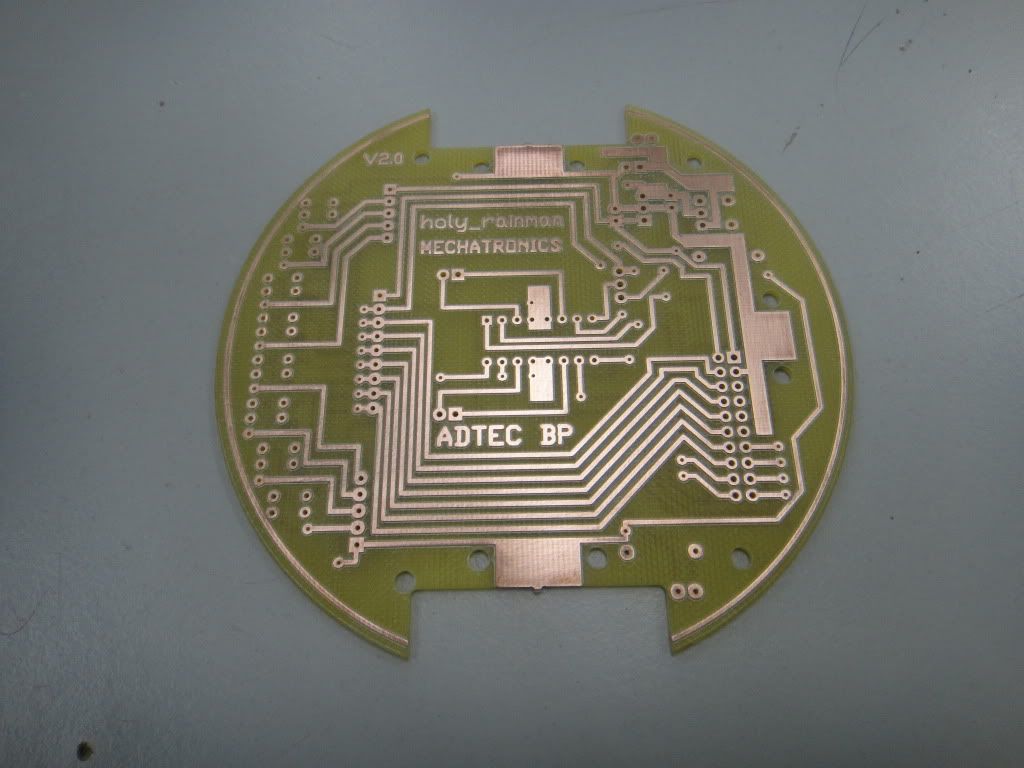
PCB Bottom 2:
The video:
Compiler: PICBasic Pro 2.46
Source code: Basic Language
Schematics & PCB Docs:
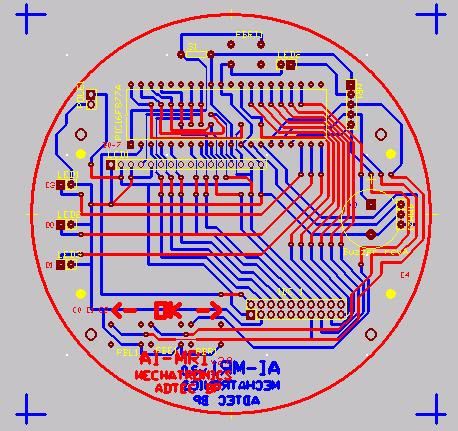
PCB Top:
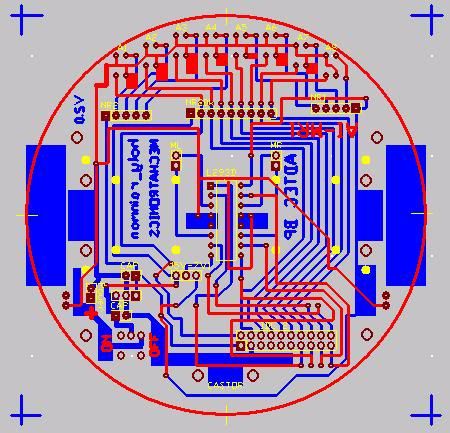
PCB Bottom:
Programing:
Refer file as per attached.

