Hello everybody!
I have bought from Cytron the SmartDriveDuo-30 Dc motor driver https://www.cytron.io/c-93-dc-motor-driver/dc-motor-driver/p-mdds30, and I'm trying to make an autonomous tracked robod with Pixhawk (https://pixhawk.org/)as a brain.
Does anyone knows how to manipulate both?
In which mode must I turn my SmartDriveDuo-30?
Is the Microcontroller Analog/PWM the appropriate mode?
SmartDriveDuo-30 and Pixhawk
13 posts
• Page 1 of 2 • 1, 2
SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Mon Jul 30, 2018 8:34 pm
by gianakop » Mon Jul 30, 2018 8:34 pm
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-

gianakop 
- Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
Re: SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Tue Jul 31, 2018 1:21 am
by gianakop » Tue Jul 31, 2018 1:21 am
The sure is that a similar motor controller, the Sabertooth can work together with Pixhawk
Here is a video that demonstrates this cooperation:
Pixhawk connection with Sabertooth 2×12 mixed mode https://www.youtube.com/watch?v=IY_vMaAfObA
[youtube]https://www.youtube.com/watch?v=IY_vMaAfObA[/youtube]
SmartDriveDuo-30 I think is better, so I think that can also work together with Pixhawk...
I appreciate any suggestion...
Thank you in advance
Nikos
Here is a video that demonstrates this cooperation:
Pixhawk connection with Sabertooth 2×12 mixed mode https://www.youtube.com/watch?v=IY_vMaAfObA
[youtube]https://www.youtube.com/watch?v=IY_vMaAfObA[/youtube]
SmartDriveDuo-30 I think is better, so I think that can also work together with Pixhawk...
I appreciate any suggestion...
Thank you in advance
Nikos
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-
gianakop - Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
Re: SmartDriveDuo-30 and Pixhawk
![]() by Idris » Wed Aug 01, 2018 11:06 am
by Idris » Wed Aug 01, 2018 11:06 am
Hi gianakop,
I never use Pixhawk but I believe it is compatible. What is the signal come out from the Pixhawk that you plan to connect to MDDS30?
I never use Pixhawk but I believe it is compatible. What is the signal come out from the Pixhawk that you plan to connect to MDDS30?
Cytron Technologies invest time and resources providing tutorial, training and support for STEM education and maker movement. We need your support by purchasing products from Cytron Technologies. Thanks.
http://www.cytron.com.my
http://www.cytron.com.my
-

Idris 
- Posts: 409
- Joined: Thu Mar 22, 2012 5:28 pm
- Location: Pulau Pinang
Re: SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Thu Aug 02, 2018 12:00 am
by gianakop » Thu Aug 02, 2018 12:00 am
Hi Idris,
The signal that comes out from Pixhawk is an RC signal
Here is what Pixhawk says for connections with a Motor Driver for Skid Steering controll (diferential robot):
" “Skid steering” vehicles control their direction and forward/reverse motions by varying the speed of two (or more) independent wheels. For these style rovers the left wheel should be connected to RC Output 1 and the right wheel should be connected to RC Output 3."
Here you can see the original article: http://ardupilot.org/rover/docs/rover-motor-and-servo-connections.html
Thank you Nikos
- Attachments
-
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-
gianakop - Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
Re: SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Wed Aug 08, 2018 9:13 pm
by gianakop » Wed Aug 08, 2018 9:13 pm
Hi again,
After a lot of tests, a successful way to connect SmartDriveDuo30 and Pixhawk is to set SmartDriveDuo30 in RC Mode with microcontroller (Indepentent Both) and connect Pixhawk’s RC1 and RC3 outputs to RC1 and RC2 SmartDriveDuo30’s inputs using two 3Ways Connector Extension Wires

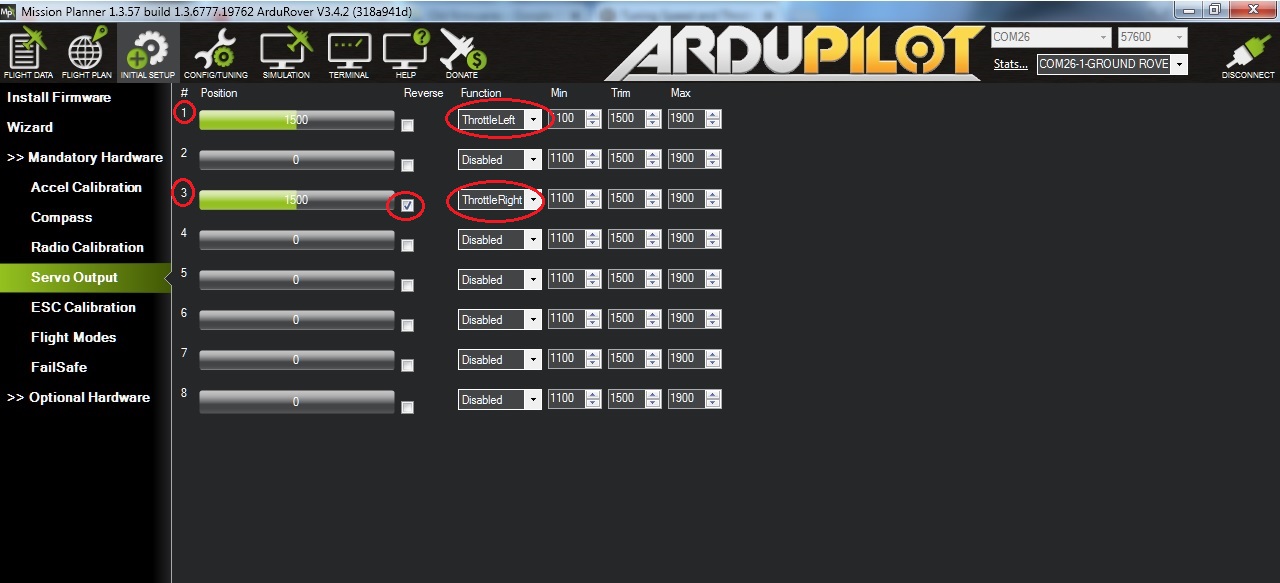
On Mission planner sofware you can also do the following:
1) From menu: INITIAL SETUP--> Mandatory Hardware --> Servo Output set: #1 Throttle Left, and #3 Throttle Right(tick also the reverse option on that)
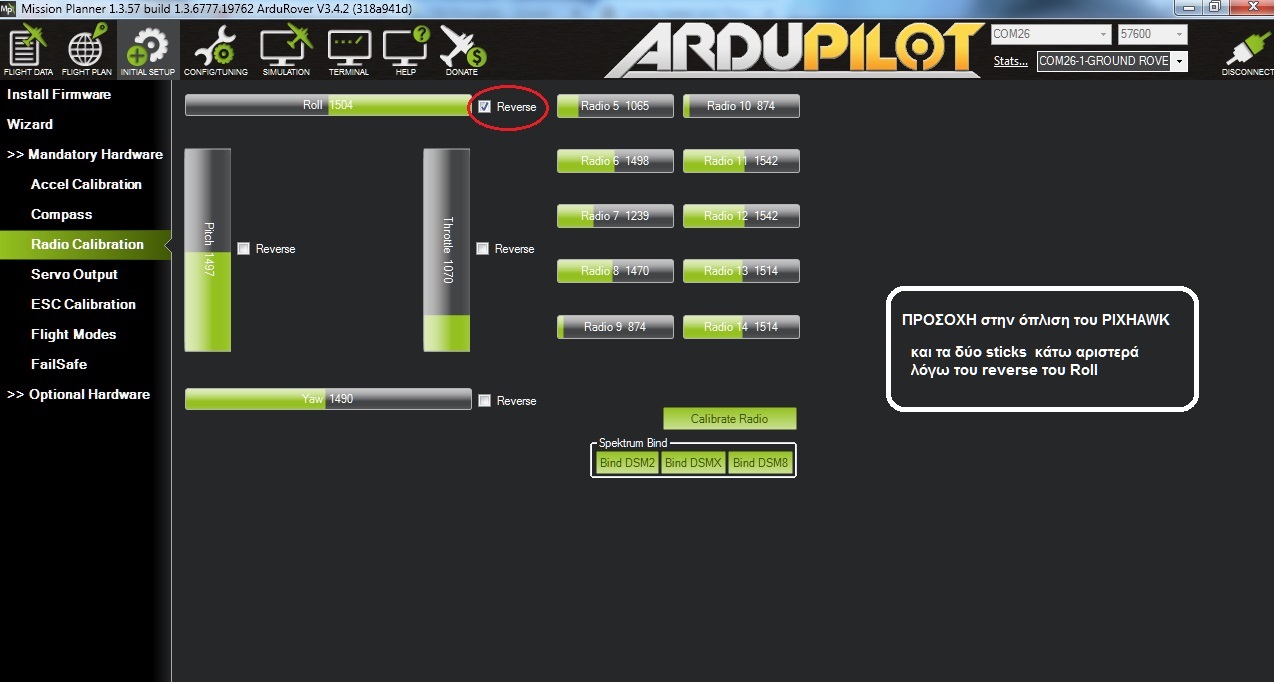
2)From menu : INITIAL SETUP --> Radio Calibration Tick the Reverse option
After a lot of tests, a successful way to connect SmartDriveDuo30 and Pixhawk is to set SmartDriveDuo30 in RC Mode with microcontroller (Indepentent Both) and connect Pixhawk’s RC1 and RC3 outputs to RC1 and RC2 SmartDriveDuo30’s inputs using two 3Ways Connector Extension Wires
On Mission planner sofware you can also do the following:
1) From menu: INITIAL SETUP--> Mandatory Hardware --> Servo Output set: #1 Throttle Left, and #3 Throttle Right(tick also the reverse option on that)
2)From menu : INITIAL SETUP --> Radio Calibration Tick the Reverse option
- Attachments
-
-
-
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-
gianakop - Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
Re: SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Thu Aug 09, 2018 4:06 am
by gianakop » Thu Aug 09, 2018 4:06 am
- Attachments
-
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-
gianakop - Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
Re: SmartDriveDuo-30 and Pixhawk
![]() by ober » Sat Aug 11, 2018 8:26 pm
by ober » Sat Aug 11, 2018 8:26 pm
Looks good! Thanks for sharing the project setup. Would love to see your robot in action. Share the video if you have.
-

ober - Posts: 1486
- Joined: Wed Apr 15, 2009 1:03 pm
Re: SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Sun Aug 19, 2018 1:29 am
by gianakop » Sun Aug 19, 2018 1:29 am
Here is the video from my Skid Steering test...
https://youtu.be/nPxv-j1DYSA
[youtube]https://www.youtube.com/watch?time_continue=8&v=nPxv-j1DYSA[/youtube]
https://youtu.be/nPxv-j1DYSA
[youtube]https://www.youtube.com/watch?time_continue=8&v=nPxv-j1DYSA[/youtube]
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-
gianakop - Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
Re: SmartDriveDuo-30 and Pixhawk
![]() by Idris » Tue Aug 21, 2018 9:30 am
by Idris » Tue Aug 21, 2018 9:30 am
Hi gianakop,
This is great! I have share your steps to interface between MDDS30 and Pixhawk in MDDS30 Product Page. Thank you very much.
This is great! I have share your steps to interface between MDDS30 and Pixhawk in MDDS30 Product Page. Thank you very much.
Cytron Technologies invest time and resources providing tutorial, training and support for STEM education and maker movement. We need your support by purchasing products from Cytron Technologies. Thanks.
http://www.cytron.com.my
http://www.cytron.com.my
-
Idris - Posts: 409
- Joined: Thu Mar 22, 2012 5:28 pm
- Location: Pulau Pinang
Re: SmartDriveDuo-30 and Pixhawk
![]() by gianakop » Wed Aug 22, 2018 1:27 am
by gianakop » Wed Aug 22, 2018 1:27 am
- Attachments
-
Nikos Giannakopoulos ( Math & STEM teacher)
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
Web: https://gianakop.wordpress.com/
Videos: https://www.youtube.com/user/NGYT40/featured
-
gianakop - Posts: 7
- Joined: Mon Jul 30, 2018 8:20 pm
- Location: Greece
13 posts
• Page 1 of 2 • 1, 2
Who is online
Users browsing this forum: No registered users and 13 guests