Re: SmartDriveDuo-30 and Pixhawk

Posted:
Tue Mar 22, 2022 11:19 pmby berkman
Hello, I have a cytron MDDRC10 connected in channels 1 and 3 of pixhawk, however the driver board only blinks the red leds twice. The pixhawk is armed but nothing happens when I move the sticks. How did you manage to set the correct setting for the RC mode of the smartdriveduo board? I hope that these two should be operating in the same way.
Re: SmartDriveDuo-30 and Pixhawk
Posted:
Wed Mar 30, 2022 12:14 pmby waiweng83
The motor driver LED blinks twice indicate that it doesn't receive a valid RC signal from the pixhawk.
Do you have any spare servo lying around? Try connecting it to the Pixhawk output and make sure you can control the servo.
Thanks.
Re: SmartDriveDuo-30 and Pixhawk
Posted:
Sat Aug 05, 2023 8:39 pmby sagiras
gianakop WROTE:Hi again,
After a lot of tests, a successful way to connect SmartDriveDuo30 and Pixhawk is to set SmartDriveDuo30 in RC Mode with microcontroller (Indepentent Both) and connect Pixhawk’s RC1 and RC3 outputs to RC1 and RC2 SmartDriveDuo30’s inputs using two 3Ways Connector Extension Wires
On Mission planner sofware you can also do the following:
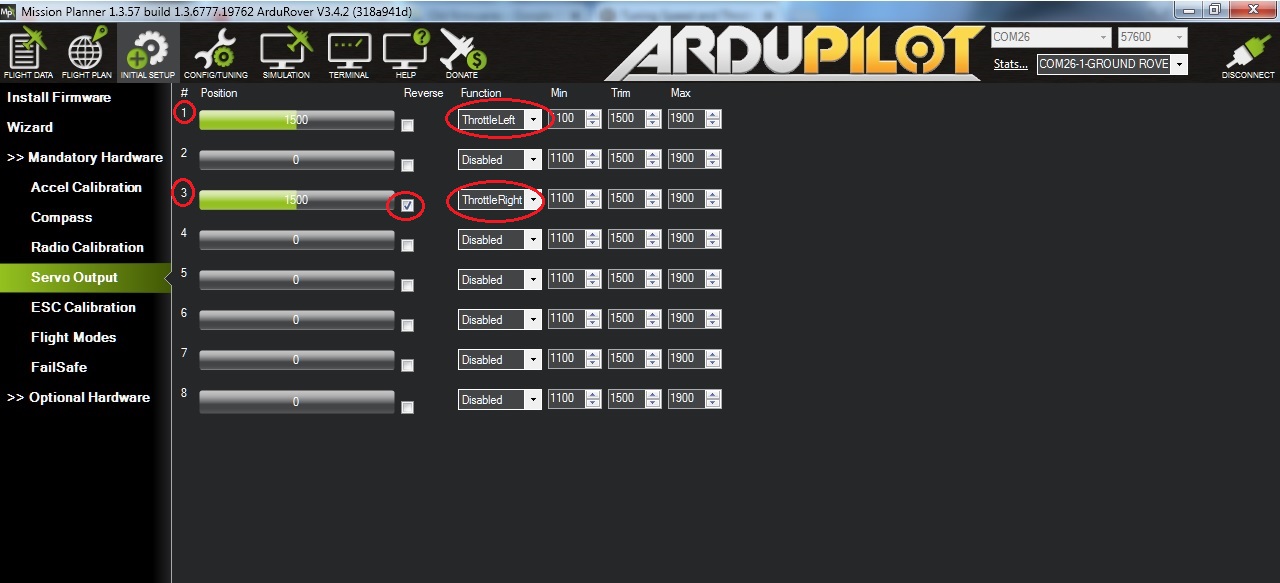
1) From menu: INITIAL SETUP--> Mandatory Hardware --> Servo Output set:
#1 Throttle Left, and
#3 Throttle Right(tick also the reverse option on that)
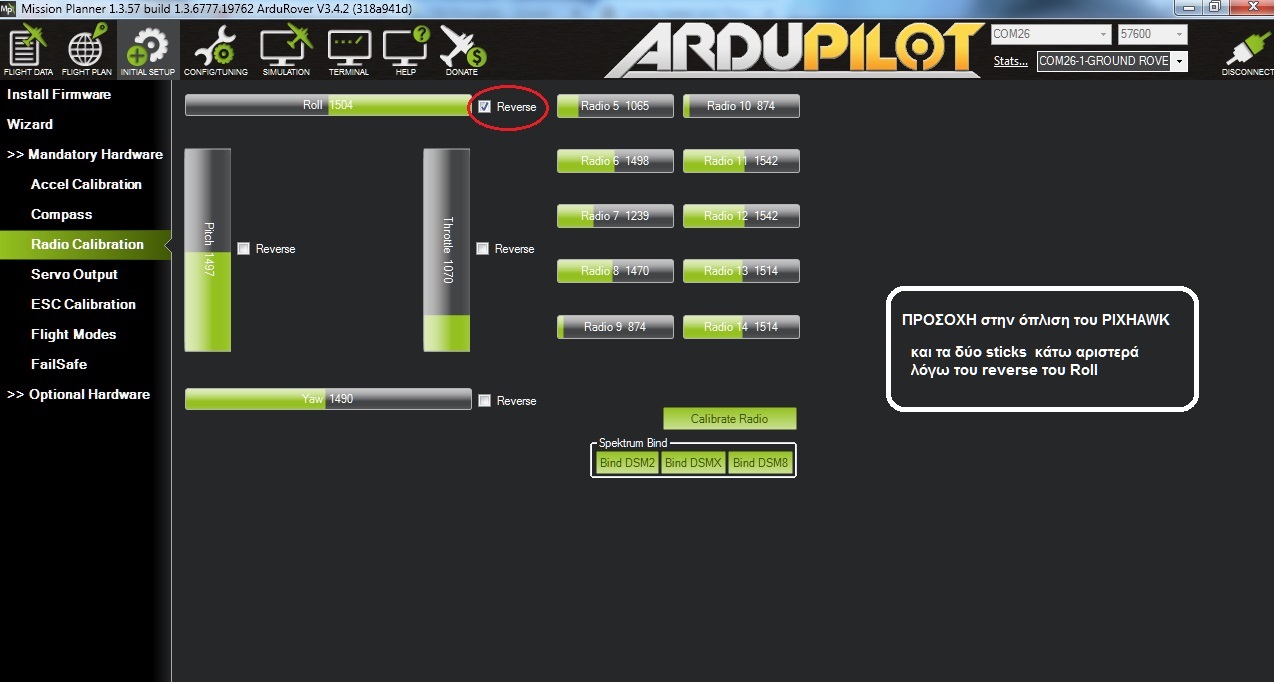
2)From menu : INITIAL SETUP --> Radio Calibration Tick the Reverse option
hi gianakop
Why did you reverse the throttle right and roll channels on the mission planner. When I try this way, the control commands I use are not correct.