Clockwise turn for D4180S servo
3 posts
• Page 1 of 1
Clockwise turn for D4180S servo
![]() by BoyU » Wed Dec 08, 2010 9:22 pm
by BoyU » Wed Dec 08, 2010 9:22 pm
I have try to program this servo motor. At center position, I send PWM pulse 1ms/2ms, the motor shaft turn 90 degree counter cloclockwise. How to make it turn clockwise direction?
- BoyU

- Posts: 5
- Joined: Wed Dec 08, 2010 9:10 pm
Re: Clockwise turn for D4180S servo
![]() by hyng » Thu Dec 09, 2010 12:40 pm
by hyng » Thu Dec 09, 2010 12:40 pm
If you continuous give 1ms pulse (example),the servo will rotate to one direction. After that you just continue give 2ms pulse (example) the servo will rotate to another direction. There is a sample source code on controlling servo motor at the product page. You may refer it. 
tutorial - http://tutorial.cytron.com.my
site - http://www.cytron.com.my
site - http://www.cytron.com.my
-

hyng 
- Posts: 292
- Joined: Thu Apr 16, 2009 11:35 am
Re: Clockwise turn for D4180S servo
![]() by shahrul » Thu Dec 09, 2010 12:47 pm
by shahrul » Thu Dec 09, 2010 12:47 pm
Maybe this signal can help you.
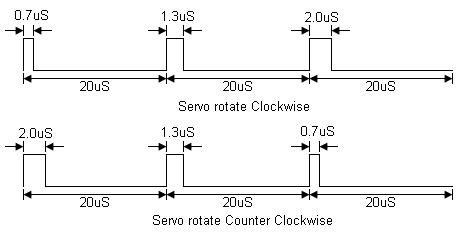
But, for every position you need to looping example 25 times. (25 x 20ms = 0.5s at every position)
See code at Servo Lesson.
But, for every position you need to looping example 25 times. (25 x 20ms = 0.5s at every position)
See code at Servo Lesson.
-

shahrul 
- Posts: 812
- Joined: Sat May 16, 2009 9:54 pm
- Location: Selangor
3 posts
• Page 1 of 1
Who is online
Users browsing this forum: No registered users and 13 guests